
Рука-манипулятор промышленного робота
Когда говорят о руке-манипуляторе промышленного робота, многие сразу представляют себе просто шарнирную конструкцию, которая хватает и переносит детали. На деле же — это целая система, где кинематика, динамика и конечный эффектор связаны куда сложнее. Частая ошибка — считать, что главное это грузоподъёмность и радиус действия. А на практике, например, при литье под давлением, критичной становится жёсткость конструкции и теплоотвод, потому что работать приходится в условиях термоциклирования и вибраций. Вот тут как раз и начинаются настоящие вопросы к материалу и технологии изготовления.
От чертежа к отливке: где кроется 'дьявол'
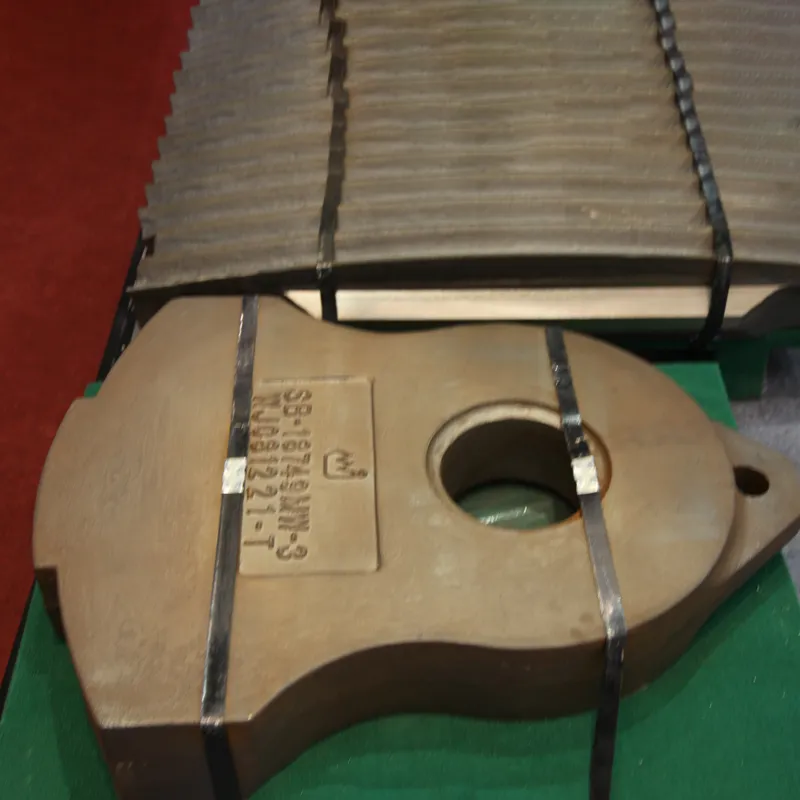
Конструкторы роботов часто выдают идеальную геометрию, но реализовать её в металле — задача для литейщика. Возьмём, к примеру, базовое звено руки-манипулятора — поворотное основание или плечо. Там идёт сложное сочетание рёбер жёсткости, каналов для проводки, посадочных мест под редукторы. Если отливка получится с внутренними напряжениями или неоднородностью структуры, после механической обработки деталь может 'повести', и собрать прецизионный редуктор станет невозможно.
Мы как-то работали над крупногабаритным кронштейном для робота сварочного комплекса. Заказчик изначально хотел стальную сварную конструкцию — дешевле и быстрее. Но после расчётов на вибронагружение и тестовых циклов выяснилось, что сварные швы становятся очагами усталостных трещин. Перешли на вариант со станой отливкой. И вот здесь началось: чтобы добиться нужного класса точности и чистоты поверхности в зонах крепления направляющих, пришлось глубоко погружаться в процесс моделирования литниковой системы. Недооценили усадку — получили брак.
В таких случаях полезно смотреть на опыт специализированных производителей. Например, на сайте АО Нинся Вэйэр Прецизион Технолоджи (https://www.nxwear.ru) видно, что они фокусируются на прецизионных отливках, в том числе станых. В описании продукции прямо указаны станые, алюминиевые и чугунные отливки. Для ответственных узлов манипулятора промышленного робота именно станые отливки часто являются компромиссом между прочностью, возможностью сложной формовки и обработкой. Но это не панацея — всё зависит от конкретной нагрузки.
Алюминий vs Чугун: выбор без очевидного ответа
Стремление к облегчению конструкции для увеличения скорости и снижения инерции толкает к алюминиевым сплавам. Особенно для верхних звеньев руки-манипулятора, где каждый лишний килограмм — это нагрузка на все предыдущие оси и большие двигатели. Но алюминиевая отливка — это история про герметизацию пористости, точное соблюдение химического состава сплава и, опять же, снятие напряжений. Помню проект, где мы использовали алюминиевое звено для робота-упаковщика. Всё было хорошо, пока в цеху не подняли температуру для другого процесса. Отливка 'поплыла' буквально на десятки микрон, чего хватило для сбоя позиционирования.
Чугун, особенно с шаровидным графитом, — это классика для оснований и станины. Демпфирование колебаний — его конёк. Но попробуйте сделать из чугуна компактный, с тонкими стенками корпус для шестой оси робота, где размещается вся проводка и пневмоарматура. Это технологический вызов по текучести расплава и формовке. Иногда проще и надёжнее сделать сборную конструкцию.
Компания АО Нинся Вэйэр Прецизион Технолоджи в своей линейке продуктов держит все три основных материала. Это разумно, потому что универсального решения нет. Выбор между сталью, алюминием и чугуном для промышленного робота — это всегда компромисс между массой, жёсткостью, демпфированием, стоимостью и технологичностью последующей обработки. Без понимания полного цикла эксплуатации робота принимать такое решение вслепую — путь к переделкам.
Точность — это не только допуски на чертеже
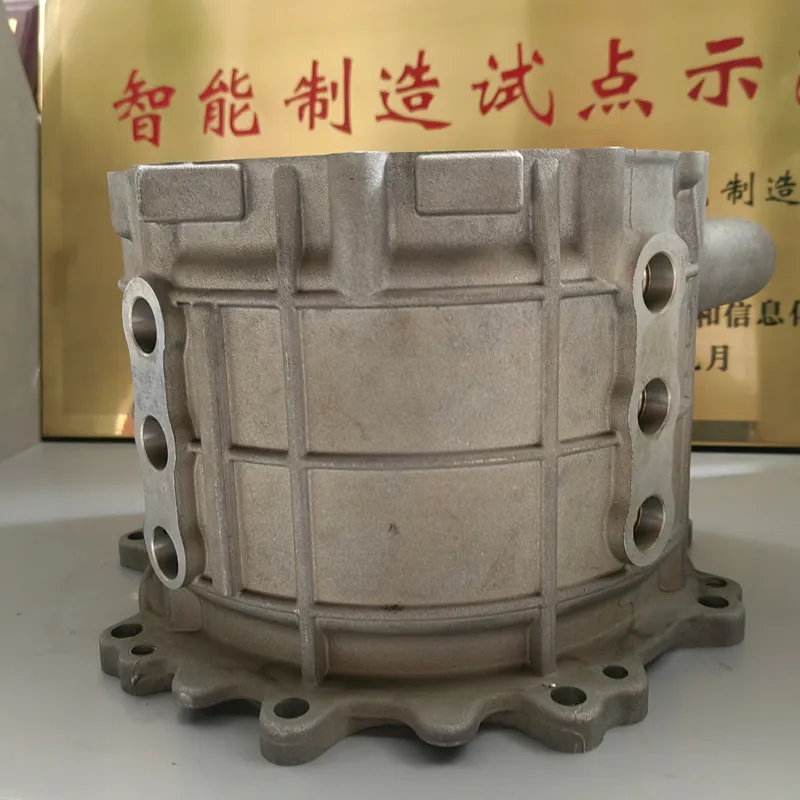
В спецификациях часто пишут: 'точность позиционирования ±0.05 мм'. Но чтобы рука-манипулятор эту точность держала в течение всего срока службы, отливка должна быть не просто точной по размерам. Критична стабильность геометрии под переменными термомеханическими нагрузками. Тот же корпус редуктора: если его посадочные отверстия 'уйдут' даже на несколько микрон из-за внутренних напряжений, появится люфт, шум, и точность на кончике манипулятора умножится на рычаг.
Отсюда и требования к прецизионному литью. Речь идёт не только о методе (по выплавляемым моделям, в кокиль), но и о полном цикле: компьютерное моделирование затвердевания, контроль структуры металла, термообработка для снятия напряжений, и только потом — высокоточная механообработка. Пропустишь один этап — получишь дорогую, но бесполезную деталь.
На этом фоне интересно, как производители компонентов, такие как АО Нинся Вэйэр Прецизион Технолоджи, выстраивают процесс. Если в их арсенале есть и станые, и алюминиевые отливки, значит, они должны иметь отдельные, хорошо контролируемые линии для разных сплавов. Потому что остатки одного сплава в другом — это гарантированный брак по свойствам материала. Для конечного заказчика промышленного робота это невидимая, но важная часть надёжности.
Практические ловушки при интеграции
Даже получив идеальную отливку, можно столкнуться с проблемами на сборке. Классическая история — нестыковка по базовым поверхностям. Допустим, отлили корпус для второго звена руки-манипулятора. На чертеже всё соосно. Но если при формовке была минимальная деформация, а контроль проводился выборочно, то при установке подшипниковых узлов может вылезти перекос. Исправлять это фрезеровкой на месте — кошмар и потеря точности.
Другая частая проблема — подготовка поверхности под специальные покрытия или уплотнения. Пористость под поверхностью, невидимая глазу, может проявиться через полгода работы, когда в поры начнёт забиваться смазка или агрессивная среда с производства. Поэтому техзадание на отливку должно включать не только механические свойства, но и требования к плотности поверхностного слоя.
В этом контексте, изучая предложения на рынке, смотрю не только на список материалов (как у АО Нинся Вэйэр Прецизион Технолоджи — сталь, алюминий, чугун), но и на то, даёт ли производитель детализированные отчётные данные по контролю: ультразвуковой дефектоскопии, твёрдости по сечению, структуре сплава. Для промышленного робота, который работает 20 часов в сутки, это не бюрократия, а страховка от простоев.
Взгляд вперёд: что меняется в требованиях
Тенденции к коллаборативным роботам и роботам с повышенными скоростями ставят новые задачи перед конструкцией руки-манипулятора. Нужно ещё больше снижать массу при сохранении прочности. Это подталкивает к использованию композитных структур или гибридных решений — например, силовой каркас из высокопрочной станой отливки с внешними облегчёнными панелями. Но как тогда обеспечить монолитность и жёсткость соединений?
Другое направление — интеграция функций. В отливку всё чаще хотят сразу заложить каналы для охлаждения (для работы в литейных или сварочных цехах), кабельные трассы, крепления для датчиков. Это усложняет форму, требует от литейщика высочайшего мастерства. Стандартное предложение 'отливка по вашему чертежу' здесь уже не работает. Нужно со-проектирование (co-engineering) с самого начала.
Думаю, успешные поставщики, будь то крупные международные бренды или специализированные предприятия, вроде упомянутого АО Нинся Вэйэр Прецизион Технолоджи, будут двигаться именно в эту сторону. Умение работать не просто с металлом, а с пониманием конечной задачи промышленного робота — от кинематической модели до условий эксплуатации — становится ключевым. Потому что рука-манипулятор — это не обособленная деталь, а основа, определяющая возможности всей системы. И её качество закладывается ещё на этапе выбора метода и материала для её создания.
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
 Манипулятор
Манипулятор -
 Статор и ротор
Статор и ротор -
.webp) Поворотная опора
Поворотная опора -
.webp) Корпус редуктора
Корпус редуктора -
 Основание (база)
Основание (база) -
 Корпус электродвигателя
Корпус электродвигателя -
 Корпус выключателя
Корпус выключателя -
 Каркасный корпус высокотемпературного сверхпроводящего магнитнолевитационного поезда
Каркасный корпус высокотемпературного сверхпроводящего магнитнолевитационного поезда -
 Щека дробилки
Щека дробилки -
 Коробка передач
Коробка передач -
 Трехсекционный корпус
Трехсекционный корпус -
 Система поворота – Связующая поперечная балка
Система поворота – Связующая поперечная балка
Связанный поиск
Связанный поиск- Гост на литье стальное
- Алюминиевая отливка в металлические формы
- Корпус сельскохозяйственной техники
- Чугунное художественное литье
- Стальное литье на заказ
- Алюминиевая отливка для рентгеновского аппарата
- Литье чугунных отливок
- Точное стальное литье
- Стальное литье по выплавляемым моделям
- Литая сталь из высокохромистого сплава



